バーチャルキャリブレーションの実践的な推進手法

皆さま、こんにちは。
IDAJの小川です。
MBD推進の一つのカギが“モデルの流通と連携”であることは間違いありませんが、モデルを使用するユーザーの立場では、普段使いなれたインターフェースを使うことや、実行したい検討シナリオをそのまま再利用できることが重要で、これらの要望を満たせないことがMBD推進の足かせとなっていることが散見されます。すでに多くのツールや実機システムなどが連携したプロセスでモデルを使用する場合、特に実機試験の置き換えとしてモデルを使用するケースでは、現在使っている設備のシステムやツールをそのまま利用できることが理想でしょう。ただし、立場や利用シーンによって最適な「モデル」と「ユーザーインターフェース」が異なるため、ユーザーの状況にあわせて、最適な組み合わせを選択できることが現実的なソリューションになります。
そこで本記事では、xMODを基盤として、モデルだけではなくユーザーインターフェースを適切に組み合わせて、バーチャルキャリブレーション環境を構築する手法をご紹介します。
xMODによる制御とバーチャルキャリブレーション環境の構築
まずは、xMODによるバーチャルキャリブレーション環境の概要からご紹介します。
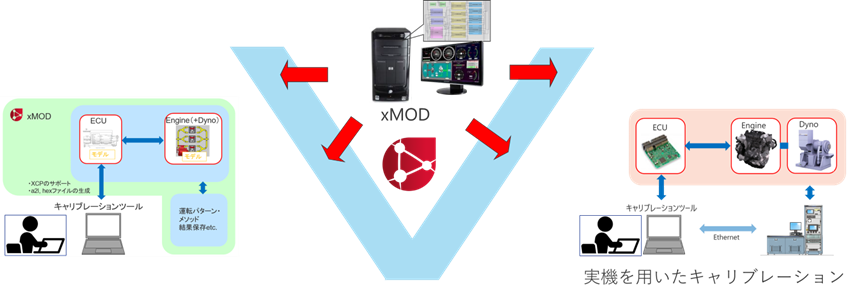
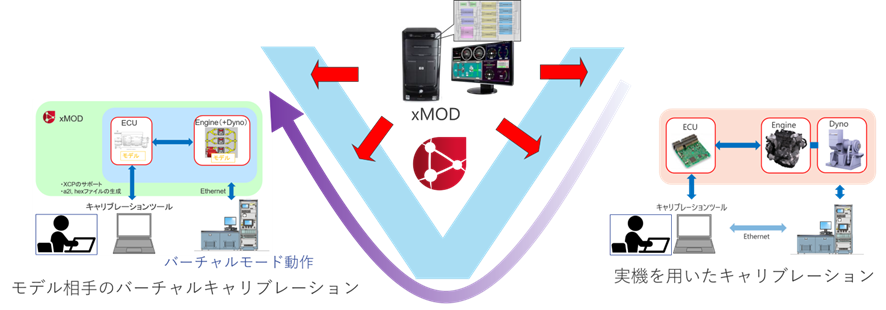
自動車パワートレイン分野における実機を用いたキャリブレーション試験の概略図をご覧ください。いずれもコントロールユニットとその制御対象であるプラント(ハードウェア)があり、実機試験設備によりシステム全体がコントロールされます。そしてキャリブレーションツールからコントロールユニットにアクセスし、制御定数を変更しながら適切な値へ調整します。

EVモータ・エンジン評価ベンチイメージ
一方で以下は、モデルを用いたバーチャルキャリブレーション環境へ置きかえたものです。ポイントは、キャリブレーションツールをバーチャルキャリブレーション環境にも適用している点です。これを実現するにはキャリブレーションツールからモデルの定数にアクセスできなければなりません。また運転パターンやメソッドを定義したり、キャリブレーションツールとモデル環境が異なるPCであれば通信を行う必要があります。これらを実現する環境がxMODです。
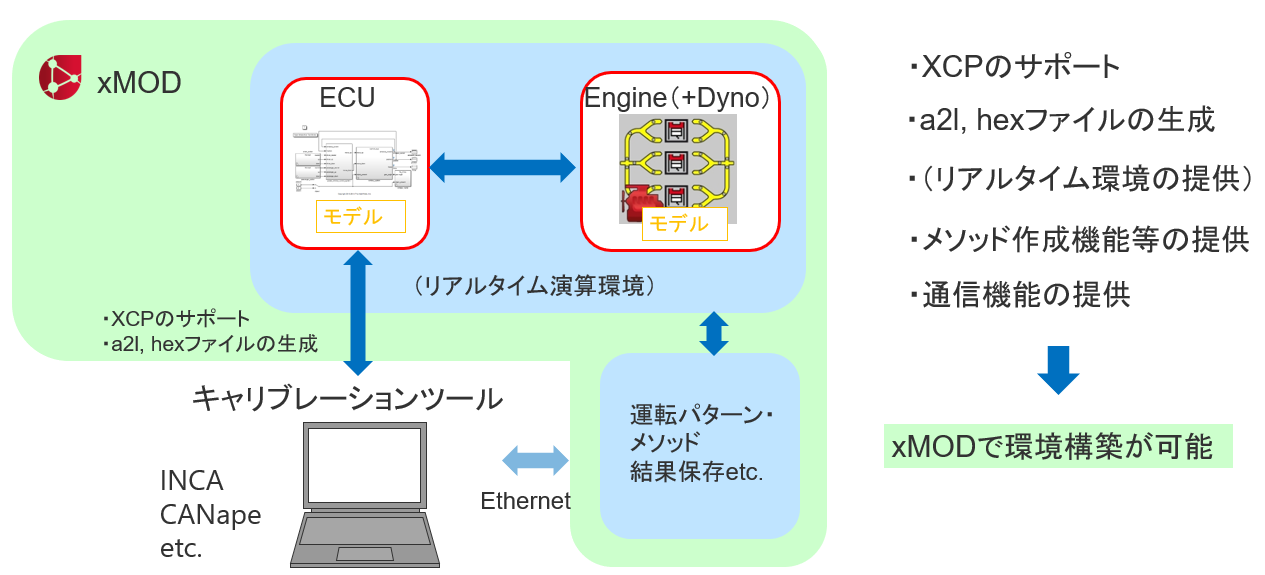
バーチャルキャリブレーション環境概要
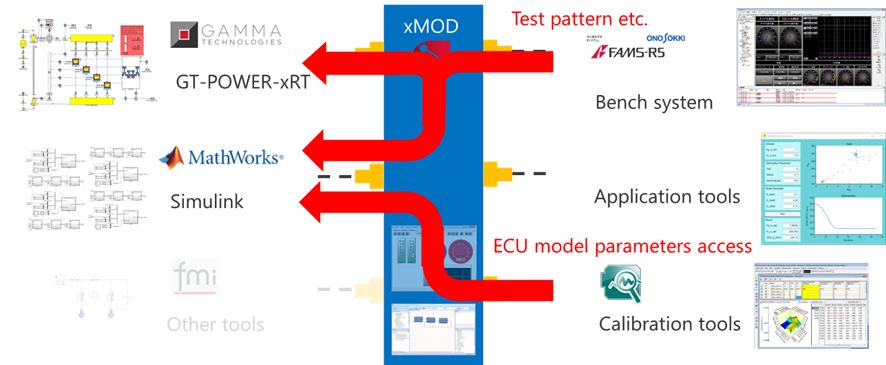
xMODは、シミュレーション環境を構築するためのプラットフォームで、さまざまなモデリングツールのモデルを取り込んだツール連携が可能です。またキャリブレーションツールからモデル上の制御パラメータにアクセスでき、実験設備で使用されているテストシナリオを共有することができます。
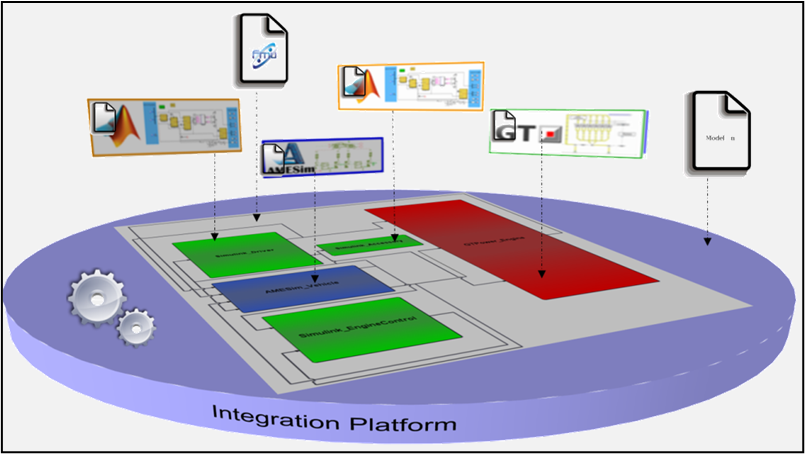
xMOD概念図
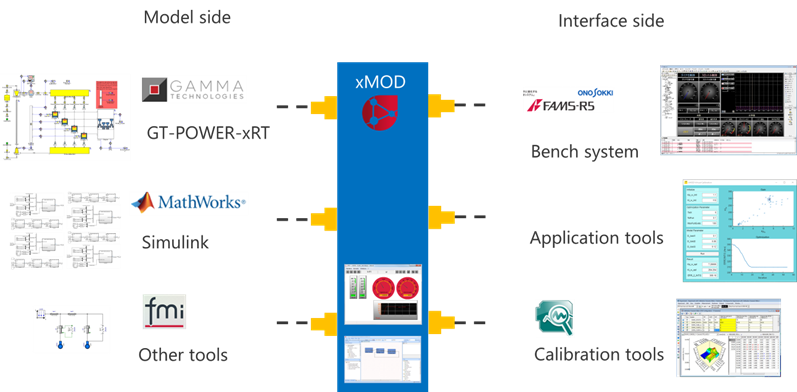
xMODにおける連携
モデリングツールへの対応
xMODは、GT-SUITEやAmesimなどといったさまざまな主要モデリングツールや、モデル形式に対応しています。モデル形式は、実行形式(dll)、FMI規格、ツールカップリングの3つに大別できます。制御モデルは、MATLAB/Simulinkがベースになっていることが多いかと思いますが、xMODでは、Simulinkモデルを自動分割してビルドする、各モデルの入出力信号を自動結線する、同期方式を選択するなど、制御の本番モデル(大きなモデル)を効率よくハンドリングできるのも強みの一つです。
xMODでのモデル連携
XIL APIとXCPによるモデルのハンドリング
XCP(Universal Calibration Protocol)は、測定・キャリブレーションツールとECUなどのソフトウェア間の通信を行い、キャリブレーションするパラメータや内部測定値へアクセスするためのプロトコルです。本規格にxMODが対応していることにより、INCAやCANapeなどのキャリブレーションツールから、モデルを相手にキャリブレーションを実施することが可能になります。

キャリブレーションツールからSimulinkパラメータへのアクセス
机上検討と実機試験でキャリブレーションツールを共有
テストオートメーションとテスト対象間の標準(ASAM)規格であるXIL API(X–In–the Loop Application Programming Interface)を使うことで、既存の実機ベンチで使用しているテストシナリオを共有し、モデル相手に同じテストシナリオを流し込むことといったことが可能になります。さらにシミュレーションの開始や停止などをコントロールすることで、最適化を含んだ計算を繰り返すこともできます。
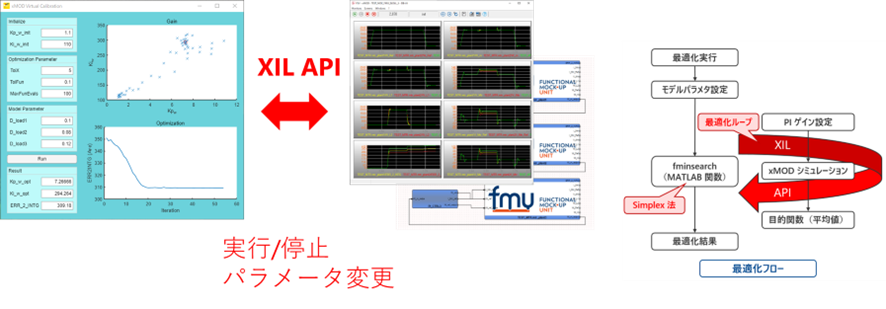
XIL APIを使用した最適化計算
試験設備システムとの連携
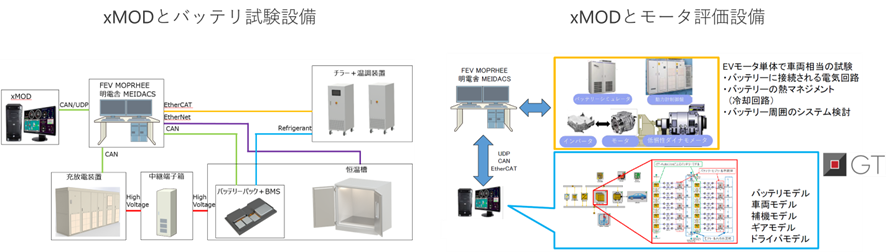
CAN、TCP、UDP、EtherCAT通信によって、別の端末や機器、設備と連携しますので、実機試験に慣れている方であれば、いつも通りにユーザーインターフェースを使用しながら、モデルを使った検討ができます。
前述のキャリブレーションツールと合わせて使用することで、試験設備システムからテストパターンを指定しながら、キャリブレーションを実施でき、結果的にキャリブレーションで使用するユーザーインターフェースを、左右バンクで共通化することができます。
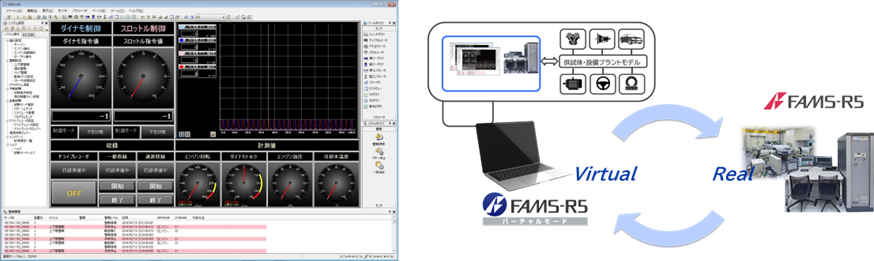
XIL xMODとFAMS(株式会社小野測器様)との連携
キャリブレーションツールに加えて試験設備システムからもアクセス可能
XIL 試験設備システムやキャリブレーションツールの左右バンク共通化
リアルタイム環境への拡張
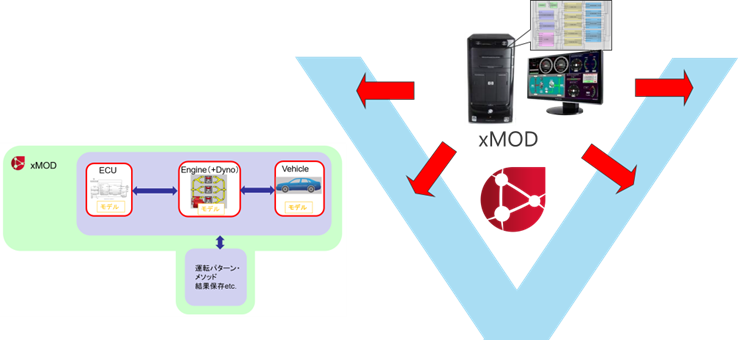
xMODを使用すると、リアルタイム環境へと容易に拡張することができますので、最後に補足します。
xMODとともに採用されているリアルタイムOS(RTX64)を使って、すべてがモデルの状態(MILS・SILS)で検討を開始し、次第に実物を増やしながら段階的に試験を行うことができます。図13は実機試験システムとxMODとの連携事例です。
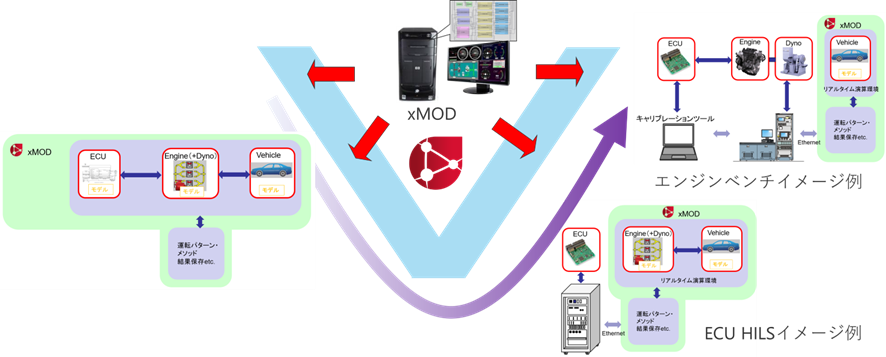
モデルをMILS・SILSからHILSへ展開
まとめ
改めて考えてみますと、多くの製品には制御が組み込まれており、制御のあるところには必ず定数があり、その乗数を適切に設定してこそ製品の能力が発揮されることから、制御定数のキャリブレーションは、分野や業界を問わないテーマです。そしてこのキャリブレーションを左バンク側へシフトすることでバーチャル化し、開発のフロントローディングが実現できれば、全体的に開発効率が上ります。ただし、右バンク側の負荷は下がりますが、左バンク側の負荷が上がるため設備環境や人などのリソースの不均衡が生じ、それらの再分配と共通化という新たな課題が発生します。そこで、仮想世界で制御定数キャリブレーションを実施するために、左バンク側でモデルだけでなく試験で使用される設備ツールまでを繋げて活用するための構成をご紹介しました。
xMODを使用すれば、最適な“ユーザーインターフェース”と“モデル”の組み合わせを選択できるようになり、結果的に多くのユーザーが利用しやすい環境を提供し、実践的にモデル活用を推進いただくことができると考えています。
xMODやバーチャルキャリブレーションにご興味がおありの場合は、どうぞお気軽に下記までお問い合わせください。
 ■お問い合わせ先
■お問い合わせ先
株式会社 IDAJ 営業部
E-mail:info@idaj.co.jp
TEL: 045-683-1990