実測とのコリレーションによる高精度モータNV解析と対策検討(その1)

皆さま、こんにちは。
IDAJの玉手です。
モータは、小型精密機械や大型産業機械などの駆動源として広範囲に用いられ、近年は地球環境保護の観点から、自動車の電動化が進み、特にEV・PHEV用モータを中心に市場は急速に拡大しています。一方で、高出力化や小型・軽量化に伴って振動や騒音が増大する傾向にあり、モータの振動騒音対策への関心が高まっています。
NV(Noise・Vibration、振動騒音)の発生は、様々な原因が考えられますが、電磁的な加振力が要因の一つです。今回は、実測データを基にしたモータの電磁的な加振力によるNV解析モデルの構築と、対策検討事例についてご紹介します。
NV解析事例
JSOL社製のJMAG、多目的ロバスト設計最適化支援ツールmodeFRONTIER、Simcenter Nastran Acousticsを使って、下に示すようなIPMモータを対象に、NV解析を実施しました。
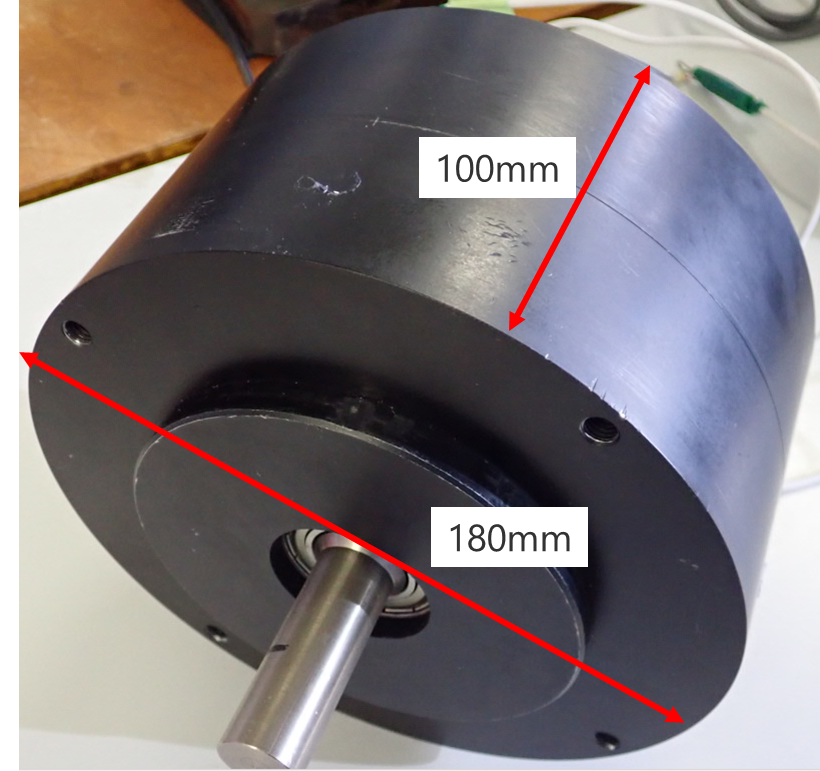
モータ外観
|
項目 |
仕様 |
項目 |
仕様 |
項目 |
仕様 |
|
電源電圧 |
200 V |
結線方法 |
Y結線3直列 |
ステータ内径 |
96 mm |
|
モータタイプ |
IPM |
モータ軸長 |
100 mm |
ギャップ長 |
0.70 mm |
|
極数 |
6 |
モータ外径 |
180 mm |
巻線パターン |
34 ターン |
|
スロット数 |
9 |
ステータ軸長 |
30 mm |
― |
ー |
モータの計測
解析モデルの高精度化のため、JFEテクノリサーチ様にCADモデルの作成、無負荷誘起電圧、負荷時のギャップ磁束密度、各部品の伝達関数の測定等を実施していただきました。これらの情報を活用して解析モデルを構築します。
電磁界解析
(1)解析モデルの諸元
モータは、主に磁気回路部を対象としてモデル化しました。モータの負荷状態の解析条件としては、下図のトルク-スピード曲線で示すように1,000rpmから6,000rpmの範囲で1,000rpm毎に6点分の動作点を計算します。これら動作点における実測の電流波形を入力し、解析を実施しました。
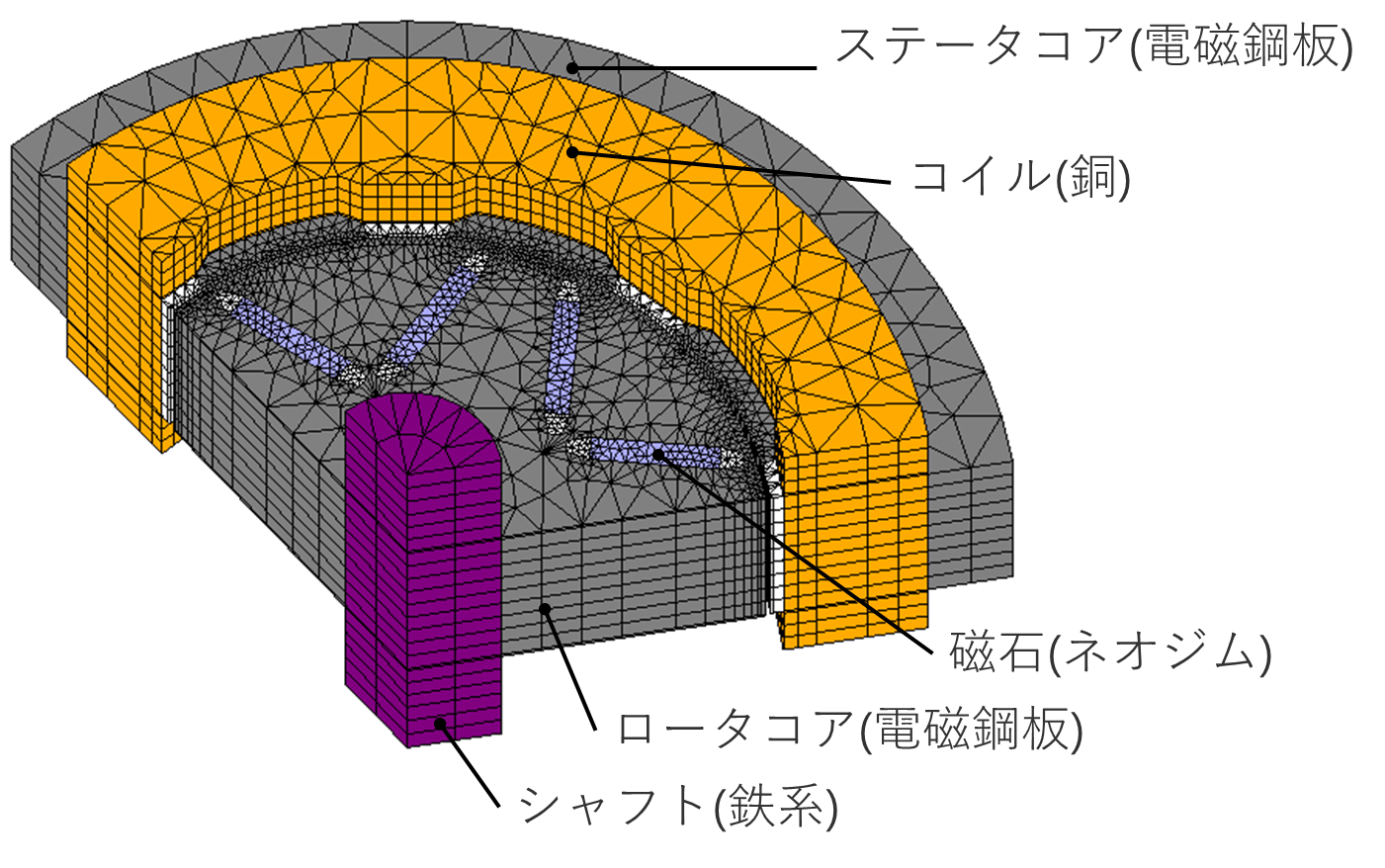
電磁界モデル
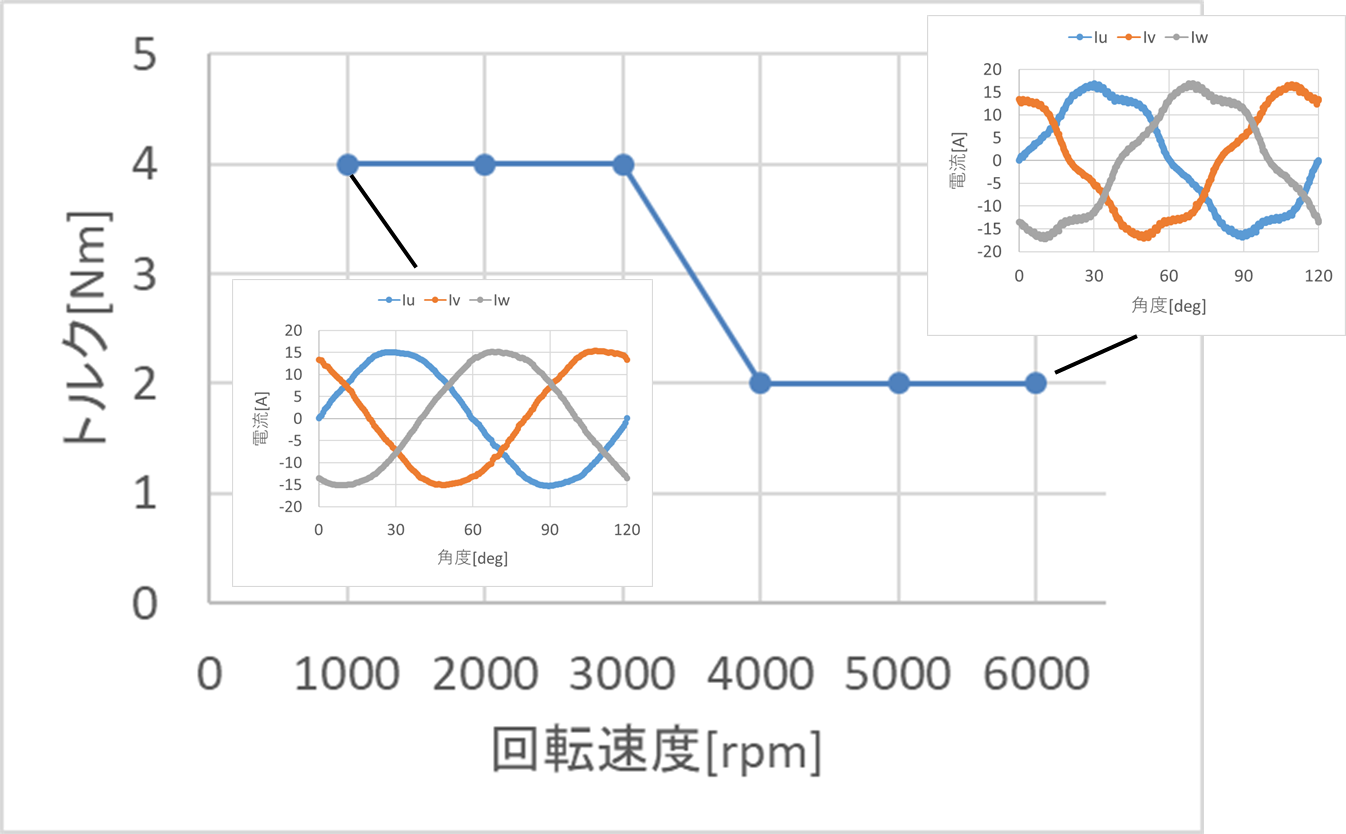
電磁力のために計算した動作点
(2)実測とのコリレーション
無負荷誘起電圧、負荷時のギャップ部磁束密度変化について実測と解析の比較を示します。ご覧の通り、よく一致した結果が得られ、電磁界解析モデルは精度の高いモデルが構築できたと言えます。
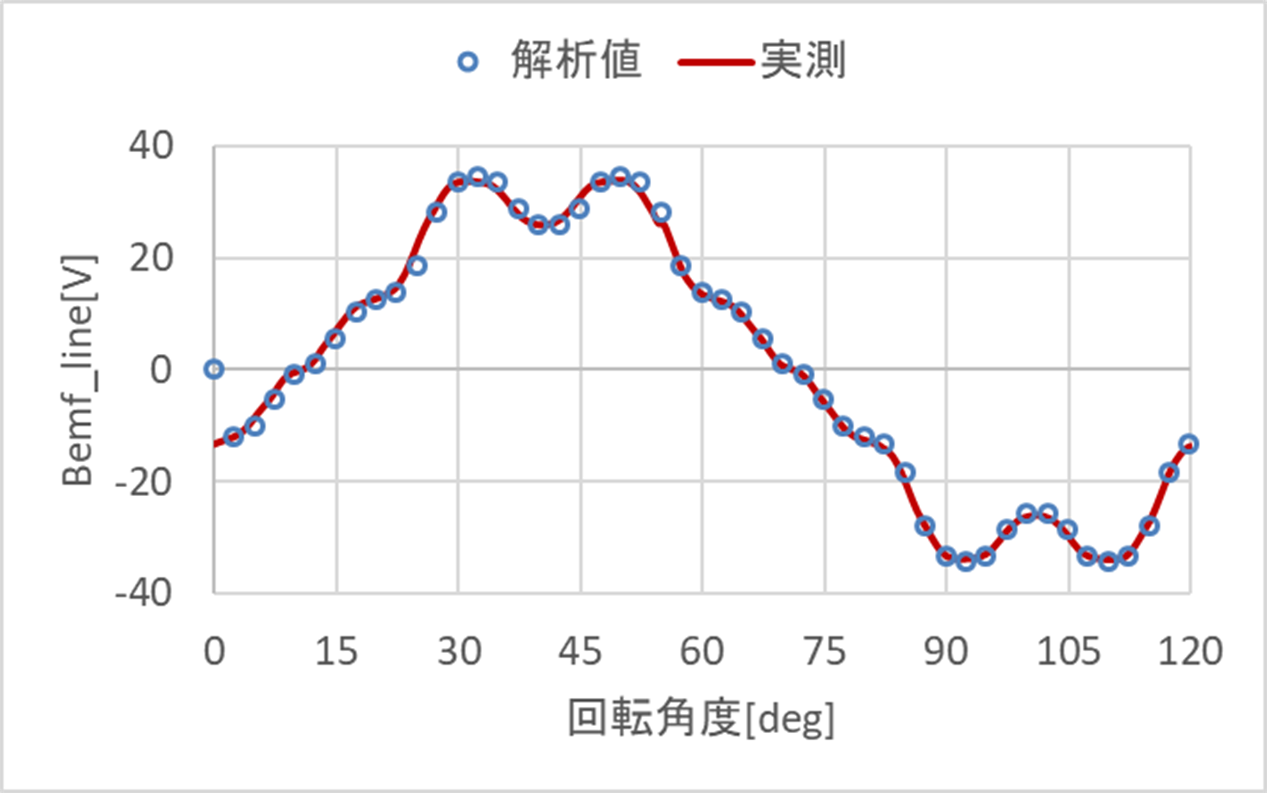
無負荷誘起電圧
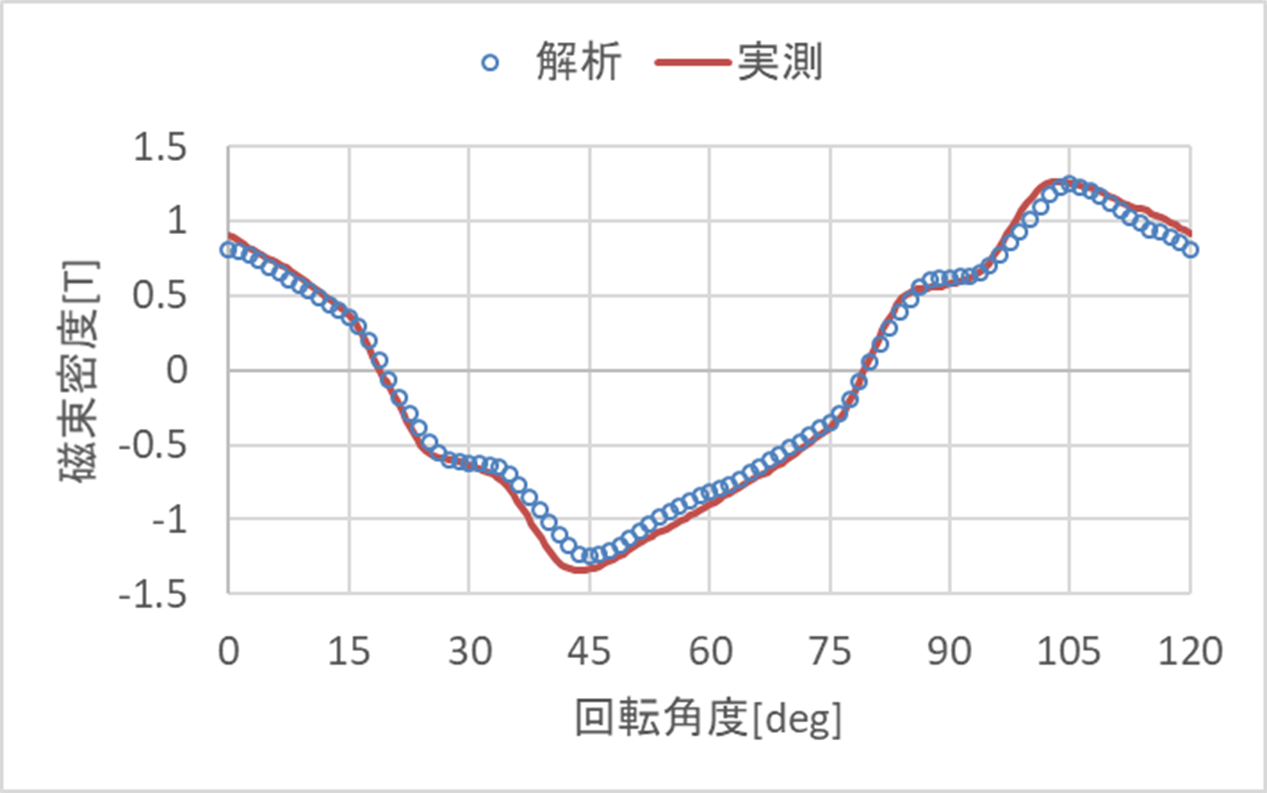
ギャップ部磁束密度変化
(3)電磁力解析結果
続いて電磁力のベクトル分布を示します。ティース先端に回転する大きな力が生じていることがわかります。また、ティース1に着目して力のFFTを確認すると、各回転数において下に示す結果となりました。それぞれの基本周波数における力の大きさは比較的同程度ですが、高周波は各回転数で傾向が異なっている様子がわかります。このような特徴を持つ電磁力をNV解析のモデルへ入力しました。
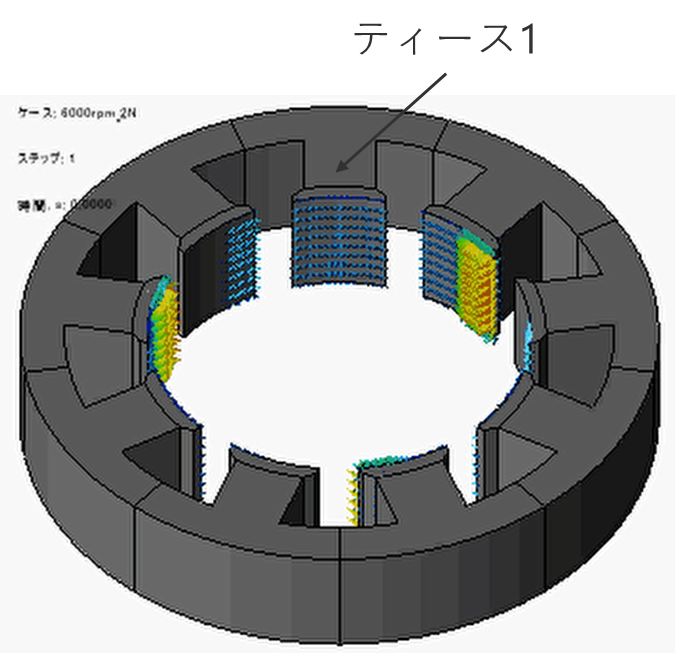
電磁力ベクトル
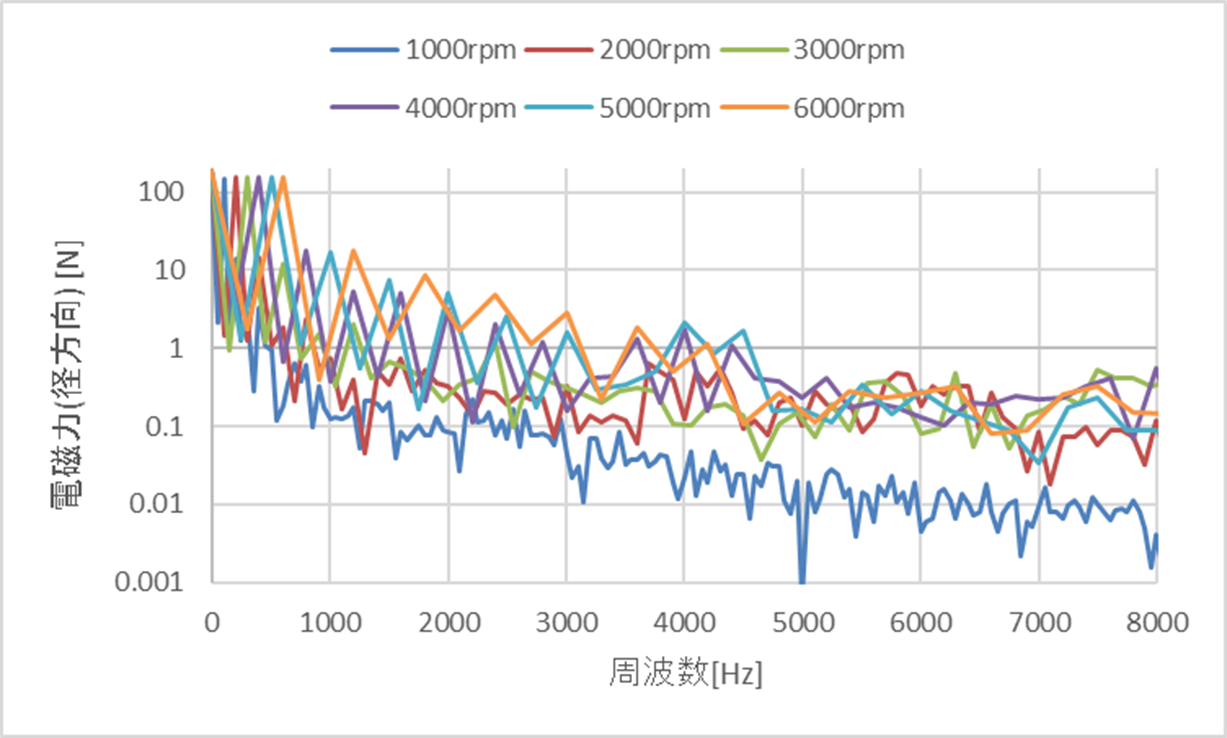
ティース1の径方向力FFT
続いて、NV解析についてご説明します。
実測とのコリレーションによる高精度モータNV解析と対策検討(その2)
■オンラインでの技術相談、お打合せ、技術サポートなどを承っています。下記までお気軽にお問い合わせください。ご連絡をお待ちしています。
株式会社 IDAJ 営業部
Webからのお問い合わせはこちら
E-mail:info@idaj.co.jp
TEL: 045-683-1990