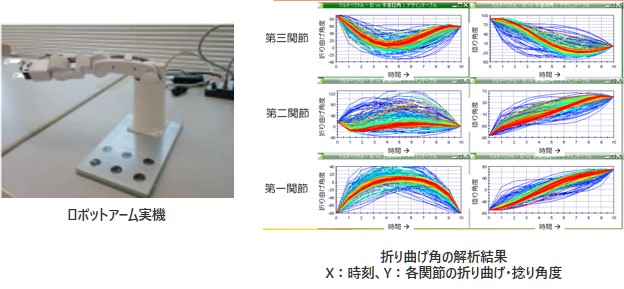
ロボットアームの実機チューニングの試行例
- 分野2:
- 最適設計
使用ソフトウェア
modeFRONTIER、LabVIEW概要
ロボットアームの実機の消費電力最小化を目的に、各関節の駆動角度をベジエ関数を用いた入力として、運動解析の最適化を行いました。 その結果、ロボットアームの挙動が滑らかで無駄な動きが少なくなり、より少ない電力で制御することが可能になりました。
解析種別:制御
ロボットアームの実機の消費電力最小化を目的に、各関節の駆動角度をベジエ関数を用いた入力として、運動解析の最適化を行いました。 その結果、ロボットアームの挙動が滑らかで無駄な動きが少なくなり、より少ない電力で制御することが可能になりました。
解析種別:制御