Cognata自動運転シミュレーション
概要
AD/ADASのカギを握る認識技術の重要性
自動運転ならびADAS機能の実現において、堅牢な認識アルゴリズムは不可欠な要素です。周辺認識が高精度かつ安定しているほど、その後の走行経路の判断や車両制御を含めたシステム全体の堅牢性が担保されます。従来、認識アルゴリズム開発は現実データをトレーニングデータとして活用してきました。しかし、現実データのみで必要とされるトレーニングデータを網羅することは非常に難しい課題であり、現実データとシミュレーションの双方を効率よく利用することが肝要です。
Cognataは生成AIを利用したデータオーグメントによるトレーニングデータ拡張、シミュレーションの技術を通してお客様の課題を解決します。


シミュレーション・現実データ拡張 2つのアプローチ
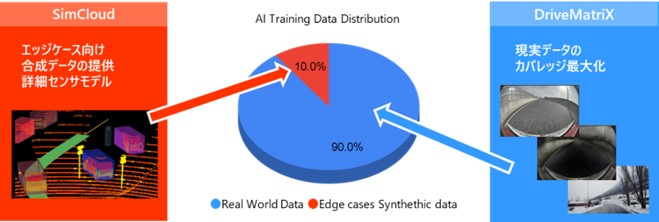
認識アルゴリズムの学習には、現実のデータと合成データ双方を効率よく利用する必要があります。 Cognataは現実データ・合成データ双方に対してソリューションを提供します。エッジケース評価にはシミュレーション環境のSimCloudを、現実データにはDriveMatrixデータオーグメンテンションを提供しトレーニングデータのカバレッジを最大化します。
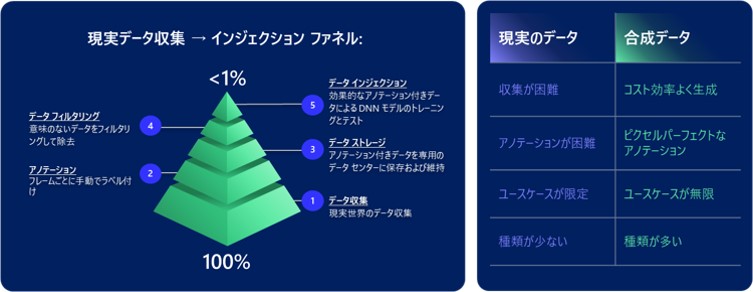
エッジケースの取得の難しさ
現実データでのエッジケース取得は非常に難しく、非効率だと考えられます。そこで、このようなエッジケースではシミュレーションの活用が最適です。
エッジケースにシミュレーションを活用
シミュレーションを利用することで、路上横臥や工事現場、横断歩道以外の横断など、稀にしか発生しないエッジケースを効率よく、簡単に作成することができます。
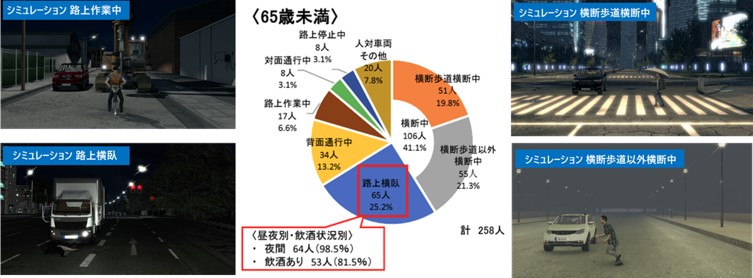
(出典:「令和5年における交通事故の発生状況について」令和6年3月7日 警察庁交通局
https://www.npa.go.jp/bureau/traffic/bunseki/nenkan/060307R05nenkan.pdf)
現実では再現が極めて難しい、逆光の中で鹿が車両前方に飛び出してくるシーンを再現しました。

シミュレーションだけを認識AIトレーニングに使った場合でも、認識AI性能を向上させることができます。YOLO(You Only Look Once)による車両や信号の検出を動画でご確認ください。

現実データ拡張にはデータオーグメンテンションを活用
鮮明な画像・気象環境を受けないセンサデータの取得・安全面等を考慮すると、路上でのデータ取得は晴天日中に取得されるのが通常です。一方で、特にカメラセンサには難しい雨、霧、雪、夜などのトレーニングデータが不足する結果となります。
DriveMatrixでは、AIデータオーグメンテンションを実現し、現実データのシーンを拡張します。これによりトレーニングデータが拡張され、認識アルゴリズムのロバスト性を強化することができます 。