xMODマルチツール連携、MILS、SILSからHILSまでモデル共有を可能とするシミュレーションプラットフォーム
機能2
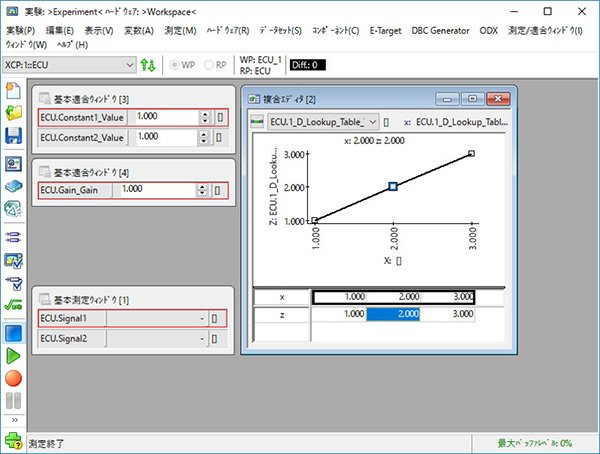
XCPによるバーチャルキャリブレーション
xMODはXCPをサポートしているため、スタンドアロンモデルのパラメータにアクセスすることができます。また、xMODから直接キャリブレーションしたり、INCAなどのキャリブレーションツールを使用したバーチャルキャリブレーションも可能です。
MILS・SILSからHILSへの拡張
xMODのマルチコア・マルチスレッド実行技術によって、リアルタイム実行の可能性が高まると、MILS・SILSモデルをそのままHILSとして利用したいという要望は自然の流れです。 xMODは、そのような要望を実現するため、WindowsベースのリアルタイムOS(RTX OS)上で実行可能なHILオプションを用意しています。xMOD HILでは、xMODで作成した以下のシミュレーション環境をそのまま再利用できます。
- ダッシュボード(GUI)
- メソッド
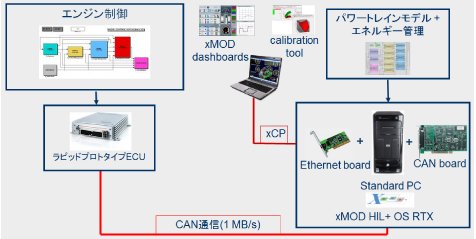
図は、xMODでエンジンシステム向けのHILS環境を構築した例です。標準的なPC上に、Windows OSとリアルタイムOS(RTX OS)をインストールし、CAN通信またはUDP通信用に、CANボード、イーサネットボードを組み込みます。エンジン制御ECUは、ラピッドプロトタイプECU(汎用コントローラ)で、制御アルゴリズムが実行されます。xMOD上では、パワートレインモデルがリアルタイムに計算されます。エンジン制御ECUとパワートレインモデルは、CANまたはUDP通信によって、必要なデータが送受信されます。